
产品详情
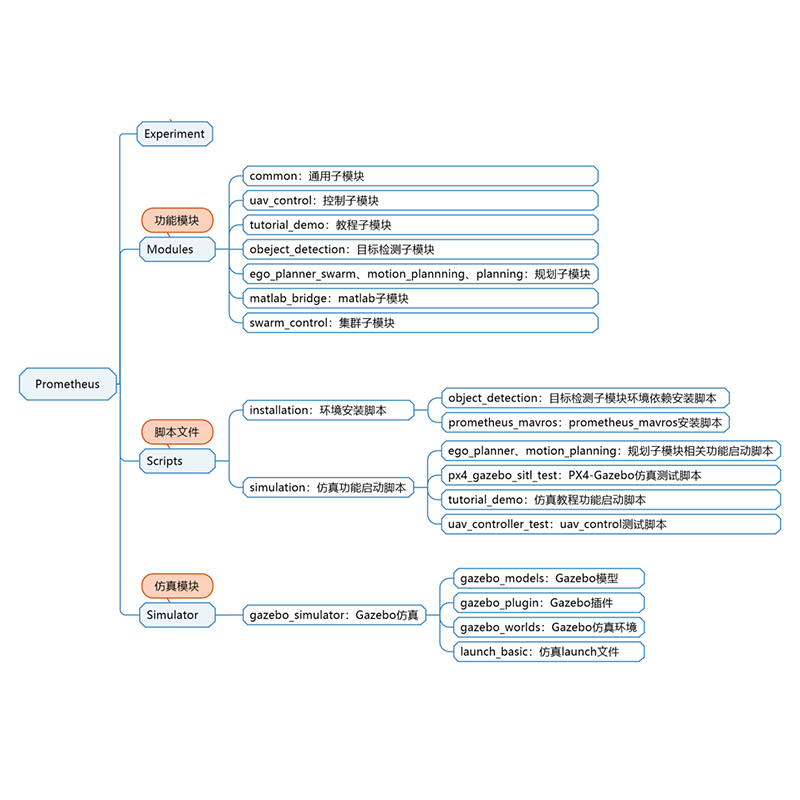
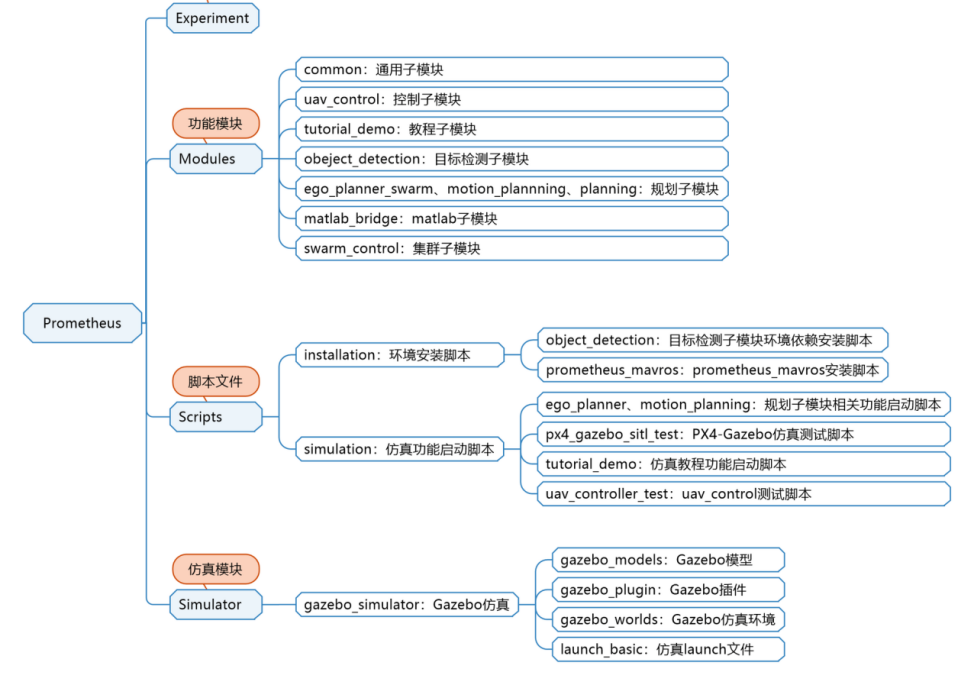
开发平台基于ROS及Prometheus开源框架,自带功能丰富,并且提供大量二次开发接口,方便高效二次开发。提供定位信息、飞行模式、电池状态、IMU等无人机状态及传感器数据接口,提供位置、速度、加速度及姿态等控制接口,提供相关开发接口使用例程。例如在控制模块上我们提供了位置,速度,加速度,姿态等控制接口,并且你也可以直接通过ROS话题订阅获得想要的无人机信息,例如订阅话题/uav*/mavros/battery(sensor_msgs/BatteryState)获取无人机电池状态,或者发布话题直接控制无人机,例如/uav*/mavros/setpoint_raw/attitude(mavros_msgs/AttitudeTarget),期望的无人机姿态控制量。并且无人机内置飞行安全检查功能(非避障),可实现异常状况的自动降落,降低炸机风险,让你开发得更安心。
特点:
· 接口开放,支持二次开发
· 配套软件仿真
· 支持PrometheusV2系统
· 安全保护机制