
产品详情
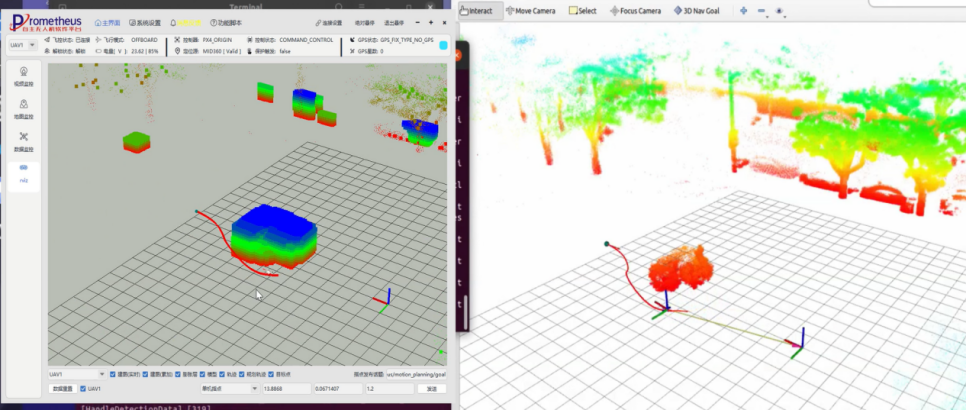
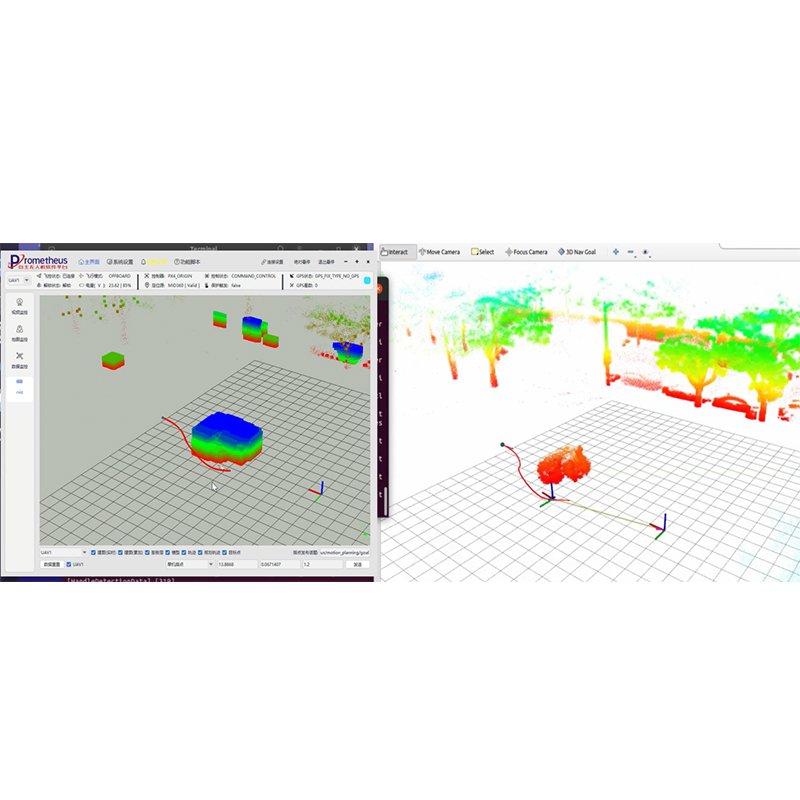
集成先进的Ego-Swarm路径规划算法,无人机得以显著提升其应对动态环境变化的自主能力。该算法能够实时解析并灵活绕过运动中的障碍物,同时迅速适应并追踪动态调整的目标点,确保在未知且复杂的操作场景中展现出非凡的灵活性与适应性。极大增强了无人机的任务执行效率,还使其能够高效、精准地完成多样化任务,展现了强大的环境适应性和任务完成能力。
特点:
· 上手简单,搭配专业版地面站,用户可在地面站直接指点飞行。
· 搜索时间快,相对于Fast - Planner来说,搜索时间提升了两个数量级,极大提升了系统的实时性。
· 自主性与鲁棒性高,每台无人机都能够自主感知当前环境并自主进行决策。
· 飞行速度快,最高可支持2m/s的速度进行避障飞行。
· 低延迟,通过本地处理传感器数据,为快速执行任务提供可靠保障。
· Octomap建图
· 支持指点规划以及航线规划
· 针对典型硬件生态打通接口,易使用
· 直观稳定可靠的轨迹生成
· 适用于室内环境搜索应用场景